

無人機網路中的強化學習自主碰撞避免與資料收集飛行軌跡規劃
無線與行動通訊網路
高榮鴻 教授
機器學習(machine learning)與無人機(unmanned aerial vehicle)是近年來電機資訊領域兩個重要的子領域。我們[1]提出一個創新的強化學習方案來訓練無人機使它們具備自主式碰撞避免的能力。我們也提出一個結合組合最佳化與連續最佳化的方法來規劃無人機飛行路線使得無人機可以有效地收集地面物聯網裝置的資料。我們考慮無人機可以運送實體物件及用無線通訊收集資料的情境。我們使用旅行推銷員演算法來決定無人機服務地面裝置的順序,再使用凸最佳化演算法來找到最好的路徑片段。我們的研究顯示我們的新方法比一些文獻上的方法更有優勢。
無線與行動通訊網路
高榮鴻 教授
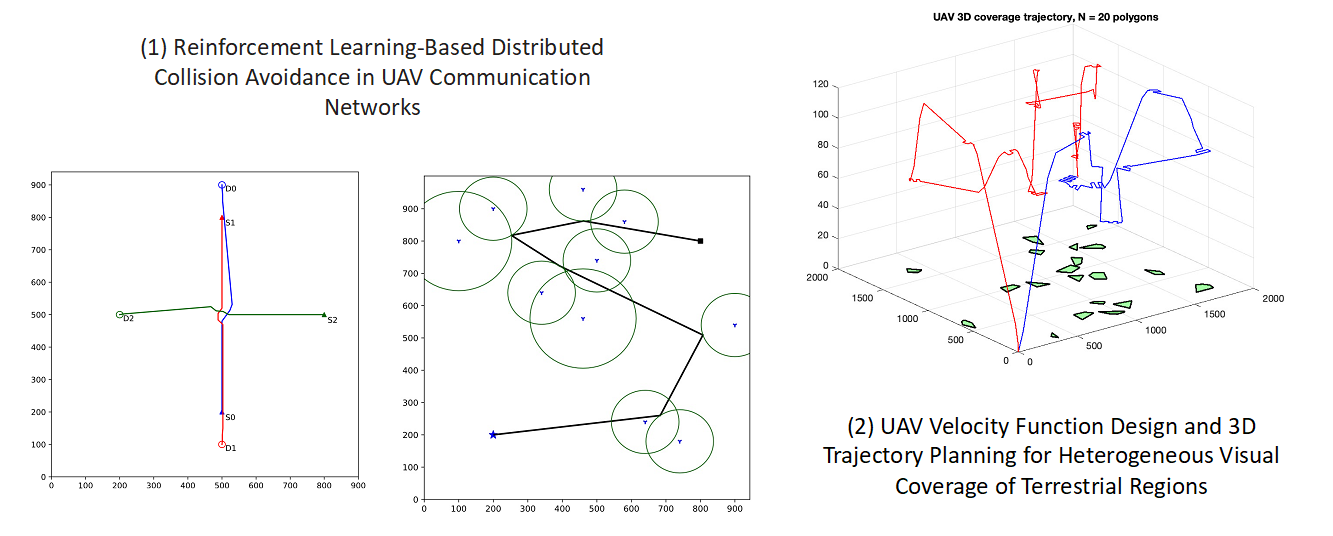
針對無人機地面視覺覆蓋,我們[2]提出一個創新方法來調整無人機在三度空間中飛行的速率與方向。我們考慮不同的地面區域需要不同的覆蓋視覺解析度。許多文獻中的方法只考慮無人機是以定速飛行且不改變飛行高度(除了起飛與降落外)的情境。為了降低無人機完成任務所需要的時間,我們考慮無人機可以動態改變飛行速度與高度的情境,並設計出無人機飛行速度函數與軌跡。我們的方案是由三個演算法組成,其中包含選擇在不同區間內不同的飛行高度,設定在一個區間內平面飛行的軌跡,及連接兩個區域的飛行速度函數。相較於文獻中讓無人機保持固定飛行高度的方法及文獻中另一個貪婪式演算法,我們的方案可以有效降低無人機任務完成時間。
[2] Y.-C. Ko and R.-H. Gau, "UAV Velocity Function Design and Trajectory Planning for Heterogeneous Visual Coverage of Terrestrial Regions," in IEEE Transactions on Mobile Computing, vol. 22, no. 10, pp. 6205-6222, Oct. 2023. (Link)